Planetary gear motors solve these problems by distributing load across multiple gear mesh points simultaneously — achieving higher torque density, better efficiency, and tighter precision than single-mesh alternatives, all within a compact coaxial package.
This article covers how planetary gear motors work, what makes them perform better than alternatives, which industries depend on them, and what to evaluate when specifying components or sourcing precision gear parts.
Key Takeaways
- Planetary gear motors distribute torque across multiple planet gears, enabling high torque density in a compact form factor
- Single-stage planetary systems achieve up to 97% transmission efficiency, significantly outperforming worm gear alternatives
- Backlash ranges from under 1 arcminute to 12 arcminutes depending on precision tier and gear manufacturing quality
- Applications span industrial automation, robotics, aerospace, medical devices, construction, and electric vehicles
- Tooth profile accuracy and surface finish directly determine noise levels, wear rate, and service life
What Is a Planetary Gear Motor?
A planetary gear motor combines an electric motor with a planetary gearbox (also called a planetary reducer). The gearbox multiplies the motor's output torque and reduces its speed before that force reaches the driven load.
Anatomy of the Planetary Gear System
Four components define every planetary system:
- Sun gear — the center input gear, driven directly by the motor shaft
- Planet gears — typically three or more gears that orbit the sun gear, meshing with both the sun and the ring gear
- Ring gear — the fixed outer gear that the planet gears mesh against
- Planet carrier — the output assembly that rotates as the planet gears revolve around the sun
What separates a planetary system from a standard single-mesh gear train is load sharing. Torque distributes simultaneously across all planet gears and their contact points with both the sun and ring gear. That shared load path is why planetary gearboxes deliver more torque per cubic inch than equivalent spur or helical gear trains — with proportionally longer service life.
How a Planetary Gear Motor Works
The power path through a planetary system follows four steps:
- The motor drives the sun gear
- The sun gear meshes with and rotates the planet gears
- Because the ring gear is fixed, the planet gears are forced to orbit the sun gear
- This orbital motion rotates the planet carrier, which acts as the output shaft — delivering reduced speed and multiplied torque

The gear reduction ratio follows the formula 1 + (ring gear teeth / sun gear teeth) for the standard fixed-ring configuration, as documented by KHK Gears' technical reference. A single stage typically achieves ratios from 3:1 to 10:1. When an application demands more, two or more stages can be stacked in series. Neugart's multi-stage gearbox guidance confirms that the total ratio equals the product of each stage's ratio — so two stages at 3:1 to 10:1 each yield an overall range of roughly 9:1 to 100:1, all within a coaxial, space-efficient assembly.
Key Advantages of Planetary Gear Motors
High Torque Density
Multiple planet gears share the load in a compact coaxial package. Neugart attributes this directly to load sharing across planet gears, and STOBER notes that planetary gearboxes handle higher torque loads in compact designs compared to spur or worm alternatives. For context, planetary units using helical gears can achieve 30% to 50% higher torque capacity than equivalent spur gear designs, according to a Machine Design technical review.
High Transmission Efficiency
Distributing mesh contact across multiple planet gears reduces frictional losses at each contact point. Product-level benchmarks from precision planetary gearbox manufacturers show:
| Configuration | Efficiency |
|---|---|
| Single-stage planetary | ≥97% at full load |
| Two-stage planetary | ≥94–96% at full load |
| Worm gearbox (comparison) | 40–90% depending on ratio |
The worm gear efficiency range comes from Regal Rexnord's worm gearbox specifications. The gap at higher reduction ratios is significant for continuous-duty applications.
Compact, Coaxial Design
Input and output shafts align along the same axis. This means planetary gear motors fit into narrow or cylindrical housings without offset mounting complications — a practical advantage for robotic joints, aerospace actuators, and medical device drives where envelope constraints are non-negotiable.
Precision and Low Backlash
Backlash performance varies considerably by precision tier:
- Standard precision (8–12 arcminutes): Suitable for general industrial drives where positioning tolerance is moderate
- High precision (3–5 arcminutes): Required for servo-driven axes, packaging equipment, and robotics
- Ultra-precision (under 1 arcminute): Reserved for optical positioning, semiconductor handling, and medical robotics
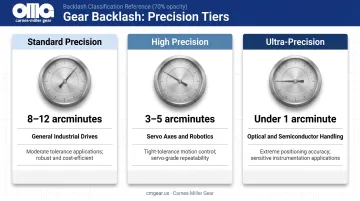
One arcminute equals 1/60 of a degree — small differences in these values have outsized effects on repeatability at the end effector.
Tooth profile accuracy, surface finish, and material selection determine where a given component lands on this scale. AGMA quality grades (per AGMA 2015-1-A01) provide a standardized benchmark, with smaller grade numbers indicating tighter tolerances — as Gear Solutions outlines. That manufacturing precision is what makes the backlash numbers above achievable in practice, not just on spec sheets.
Carnes-Miller Gear achieves AGMA 13 ratings on ground spur gears and heat-treated gears — the kind of precision that translates directly into tighter backlash and more repeatable positioning in demanding planetary applications.
Smooth, Low-Noise Operation
Continuous multi-tooth contact dampens vibration and distributes stress more evenly than single-mesh systems. The manufacturing quality of each gear directly affects this: ground gears with tight surface finish tolerances run measurably quieter than hobbed or shaped alternatives at equivalent speeds. For medical equipment, laboratory instruments, and precision robotics, that difference isn't just comfort — it's a design requirement.
Applications of Planetary Gear Motors Across Industries
Planetary gear motors appear across a wide range of industries because their combination of compactness, torque density, and precision satisfies very different requirements in each field.
Industrial Automation and Manufacturing
In conveyor systems, automated assembly lines, and material handling equipment, high torque at controlled low speeds enables reliable movement of heavy loads. CNC machine tool drives are another strong fit — Neugart's planetary gearboxes are used in Heller machining centers supporting chain magazines that accommodate 50 to 160 tools, where speed accuracy and output torque both matter during machining cycles.
Robotics
Robotic joint actuators and end-effector drives demand low backlash and high torque density so robots can execute fast, precise, repeatable movements. FAULHABER's BXI Series integrates a brushless motor with a lightweight, low-backlash two-stage planetary gearhead specifically for robotics applications. Both industrial robot arms and mobile robot drive wheels commonly use planetary gear motors.
Aerospace and Defense
Moog's aircraft electromechanical actuators use integral planetary gears with brushless servomotors for flight surface actuation, landing gear systems, and antenna drives. Simple planetary actuators handle commercial leading-edge slat applications. Compound differential planetary designs manage the higher torques required for trailing-edge flap systems, where tight dimensional tolerances and material traceability are non-negotiable.
Medical Equipment
Surgical power tools, imaging equipment positioning systems, and laboratory analyzers all require smooth, quiet, and precise motion with tight reliability requirements. Key suppliers in this space include:
- Portescap — produces planetary gearheads specifically for medical motor applications
- Maxon — develops precision planetary gearheads for surgical systems where operational consistency is critical
Construction, Mining, and Heavy Industry
Bonfiglioli's 300M Series industrial planetary geared units are deployed in mining operations. Their 300 Series mobile planetary drives are designed for severe-duty applications including drilling equipment and construction machinery — environments where shock loads, contamination, and continuous operation are the norm.

Renewable Energy and Transportation
Bonfiglioli's 700 TW Series yaw and pitch drives are used in wind turbines to control blade angle and orientation — covering a wide range of output torques for wind turbine OEM requirements. In automotive applications, planetary arrangements appear in EV drivetrains (Schaeffler's coaxial e-axle, ZF's eDrive Platform SELECT), power window actuators, and seat adjustment mechanisms.
A 2026 Scientific Reports study on a high-speed planetary EV gearbox recorded 97.8% estimated efficiency at 15,000 rpm, outperforming conventional two-stage cylindrical designs at 96.8%.
Types of Planetary Gear Motor Configurations
Most planetary gear motor designs fall into three output configurations, each suited to different mounting constraints and load requirements:
Inline (coaxial) — Input and output share the same axis. The most common configuration, suitable for connecting to pulleys, sprockets, or driven machinery across nearly all industrial and automation applications.
Right-angle — Output torque redirects 90 degrees from the motor axis. Saves installation space and adds design flexibility where linear alignment isn't possible. Ratio availability typically spans 3:1 to 200:1, making this configuration practical for a wide range of speed reduction needs.
Flange output — A direct-mount interface (standardized per ISO 9409-1 for robotic applications) that provides higher torsional rigidity. Preferred for applications with constantly reversing loads, such as delta robotics or rack-and-pinion linear drives.
Choosing the right configuration depends on your spatial constraints, load reversal frequency, and how the motor interfaces with downstream components. For custom-manufactured planetary gears, the output configuration directly influences gear geometry, housing tolerances, and surface finish requirements.
Selecting the Right Planetary Gear Motor: Key Technical Considerations
Three variables drive most planetary gear motor selection decisions: ratio range, precision requirements, and operating environment. Getting each one right before specifying a unit prevents costly redesigns later.
Gear Ratio and Speed Requirements
Match required output speed and torque to the available motor speed. Single-stage configurations typically cover 3:1 to 10:1; two-stage systems extend this to roughly 15:1 to 100:1. Multi-stage designs add axial length, so the tradeoff between ratio range and form factor needs evaluation for each application.
Backlash and Precision Requirements
Applications involving precise positioning — robotics, CNC machining, testing equipment — should specify low-backlash units and verify that gears are manufactured to tight tolerances. AGMA quality ratings are a meaningful benchmark here. A manufacturer achieving AGMA 13 on ground gears is producing a fundamentally different component than one working to AGMA 10 — the difference shows up directly in positioning repeatability and long-term wear behavior. Carnes-Miller Gear, for example, holds AGMA 13 on ground spur gears and AGMA 10 on shaped and hobbed gears, which illustrates the range of precision available within a single custom job shop.
Load Type, Duty Cycle, and Environment
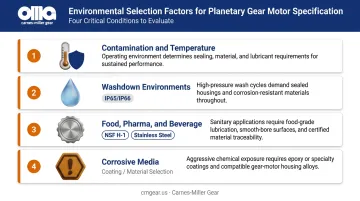
Consider whether the load is continuous or intermittent, smooth or shock-loaded. Environmental exposure drives several downstream decisions:
- Contamination and temperature extremes affect lubricant selection and seal class
- Washdown environments typically require IP65 or IP66 rated housings
- Food, pharmaceutical, and beverage applications may require NSF H-1 approved lubricants and stainless steel housings
- Corrosive media calls for material and coating specifications beyond standard steel
Frequently Asked Questions
What are the applications of planetary gear motors?
Planetary gear motors are used in industrial automation, robotics, CNC machining, medical devices, aerospace actuators, construction and mining equipment, wind turbine pitch drives, and electric vehicle drivetrains. Their torque density and compact coaxial design make them adaptable across applications with very different load and precision requirements.
What is the difference between a planetary gear motor and a standard spur gear motor?
Planetary gear motors distribute load across multiple simultaneous gear mesh points, enabling higher torque density and efficiency in a compact coaxial package. Spur gear motors use a single gear mesh path, which results in larger physical size and lower efficiency at equivalent torque levels.
What gear reduction ratios can planetary gear motors achieve?
Single-stage planetary systems typically achieve 3:1 to 10:1. Two-stage configurations extend the range to roughly 9:1 to 100:1, with the ratio determined by the ring-to-sun gear tooth count relationship. Additional stages can reach higher ratios, though each stage adds some efficiency loss.
Why are planetary gear motors more efficient than worm gear motors?
Worm gear drives generate significant sliding friction at the mesh interface, limiting efficiency to a range of 40–90%. Planetary gear systems use rolling contact across multiple gear meshes that distribute load and minimize friction losses, achieving single-stage efficiencies of 97% or higher.
How does gear manufacturing quality affect planetary gear motor performance?
Tooth profile accuracy, surface finish, and material quality directly determine backlash, noise levels, wear rate, and service life. Carnes-Miller Gear manufactures ground spur and heat-treated gears to AGMA 13, delivering tighter tolerances and more repeatable positioning than gears produced to lower quality grades.
Can planetary gear motors be used in heavy-duty applications like mining or construction?
Yes. Their high torque density and structural rigidity make them well-suited to severe-duty environments. Material selection, sealing class, and lubrication must be matched to the specific environmental demands — contamination, shock loading, and temperature range all influence the correct specification.